Spinning in situ inspirado en seda para robots situados
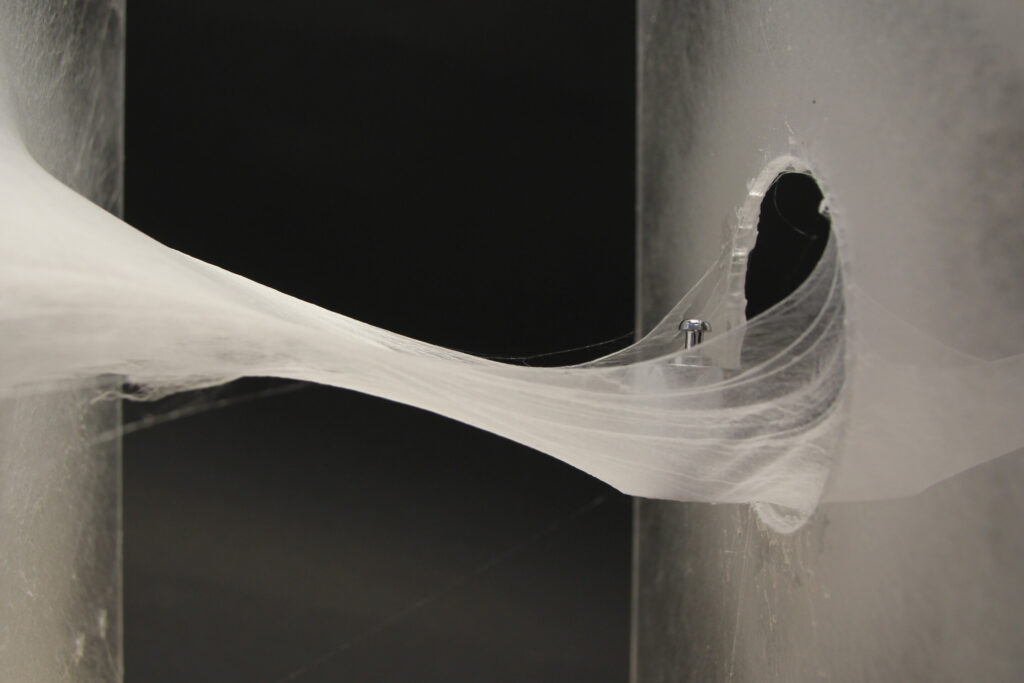

Un puente hilado que soporta un peso de equilibrio de acero para demostrar una buena capacidad de carga. Crédito: autores, CC-4.0
Investigadores del Instituto de Tecnología de la Universidad de Tartu, presentan un concepto de robótica en el que las realizaciones de robots temporales y las vías de movimiento se giran in situ desde una solución de polímero. Demuestran una pinza ad hoc para un manejo delicado y un puente para cruzar campos de escombros y terreno natural.
Si bien los modelos de idiomas grandes de hoy se adaptan situacionalmente sobre la marcha, sus cuerpos permanecen fijos. Están optimizados para una tarea específica o se integran en un principio único para todos que rara vez sobresale. Pero, ¿qué pasaría si una máquina pudiera desarrollar cualquier estructura exigida por su situación, justo cuándo y dónde se necesita?
Investigadores del Instituto de Tecnología de la Universidad de Tartu han presentado un concepto de robótica que redefine la adaptabilidad al tejer literalmente su cuerpo a pedido, al igual que las arañas giran sus redes. Al extruir una solución de polímero calentado que se enfría en fibras finas, el robot crea componentes personalizados in situ. El resultado es una fusión dinámica de máquina y entorno. Una transición perfecta que evita la separación rígida del diseño robótico tradicional.
En una serie de experimentos, el equipo mostró la notable capacidad del robot para operar en entornos complejos. En una manifestación, la máquina giró una red de fibra continua y flexible en un campo de escombros simulados, construyendo su propio puente sobre obstáculos indiferentemente si el camino estaba lleno de fragmentos de vidrio afilado o plumas de pájaros suaves.
En otra prueba, el robot se hizo girar una “extremidad” fibrosa para recuperar suavemente una flor frágil, lo que ilustra un nivel de destreza que las realizaciones prediseñadas no pueden coincidir.
El equipo demostró la adhesión indiscriminada y el anclaje de las redes giradas in situ en prácticamente cualquier sustrato, independientemente de la forma, el material o el estado de la agregación. Al igual que Spiderwebs, la red sintética aprovechó tanto la adhesión física como el enredo mecánico para asegurarse a una amplia gama de soportes.
En experimentos, la Web se ancló con éxito en superficies desafiantes como el teflón, una esponja saturada de aceite mineral y una hoja de plantas ceras.
“Nuestro enfoque toma el ejemplo de las arañas como ingenieros ingeniosos de la naturaleza, sin embargo, encontramos una escapatoria que nos permite esquivar las limitaciones y la complejidad excesiva de imitar directamente las arañas”, dijo Marie Vihmar, autora principal del estudio publicado en Robótica NPJ.
Con experiencia en estudios de diseño, Vihmar aporta una nueva perspectiva sobre el diseño no antropocéntrico y cómo la forma y la forma de los materiales crean funcionalidad, mientras que el autor principal Indrek debe, que está capacitado en ciencia materialasegura la robustez tecnológica de la innovación.
-

Camino a través de la carrera de obstáculos del fragmento de vidrio. Crédito: autores, CC-4.0
-

Una pinza fue hilada como un ejemplo de realización ad hoc. Se muestran varias preformas de pinza específicas de la tarea. Crédito: autores, CC-4.0
Este colaboración interdisciplinaria Converge el pensamiento de diseño, la ciencia del material y la robótica, produciendo ideas y soluciones que siguen siendo difícil de alcanzar los enfoques convencionales dentro de cualquier disciplina.
Al explotar las propiedades autoensamblables de las fibras de polímeros, también observadas en la seda de kiting de arañas en la naturaleza, el equipo ha creado un sistema que se ensambla dinámicamente para enfrentar los desafíos inmediatos de entornos impredecibles. Esto no solo amplía el alcance de la robótica en alivio de desastres Pero también repensa cómo las máquinas interactúan con el mundo.
Esta contribución allana el camino para los robots que no simplemente se adaptan a su entorno, sino que los transforman activamente. De búsqueda y-operaciones de rescate En zonas de desastre a métodos de construcción adaptativos que fusionan a la perfección las máquinas con los paisajes, la tecnología desafía el pensamiento industrial convencional. En lugar de obligar al medio ambiente a acomodar sistemas rígidos y prediseñados, este innovador enfoque de “pensamiento forestal” faculta a las máquinas para crecer y evolucionar en el acto.
Esta investigación marca un paso significativo en la convergencia de la inspiración biológica y la robótica. Introducir una era en la que las máquinas no son herramientas estáticas, sino entidades dinámicas capaces de reinventarse no solo mentalmente, sino también físicamente.
Más información:
Marie Vihmar et al, inspirada en la seda, girando en la web in situ para robots situados, Robótica NPJ (2025). Dos: 10.1038/s44182-025-00019-2
Proporcionado por el Consejo de Investigación de Estonia
Citación: Inspirado en la seda in situ girando para robots situados (2025, 7 de marzo) Recuperado el 8 de marzo de 2025 de https://techxplore.com/news/2025-03-silk-situ-web situado-robots.html
Este documento está sujeto a derechos de autor. Además de cualquier trato justo con el propósito de estudio o investigación privada, no se puede reproducir ninguna parte sin el permiso por escrito. El contenido se proporciona solo para fines de información.
